
"Sinds 2000 werk ik aan de ontwikkeling van sculpturen met expressieve beweging als uitgangspunt."
Gebalanceerde Manipulator Arm - 2020
Inherently dynamically balanced robotic arm for high-speed manipulation of pick & place tasks (2020)
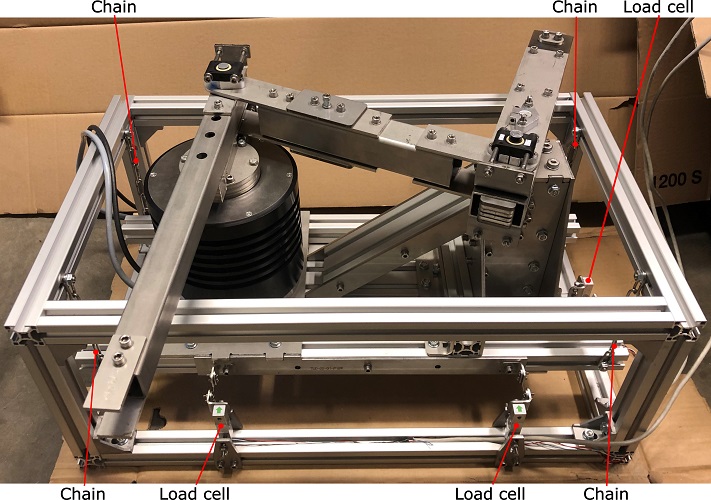
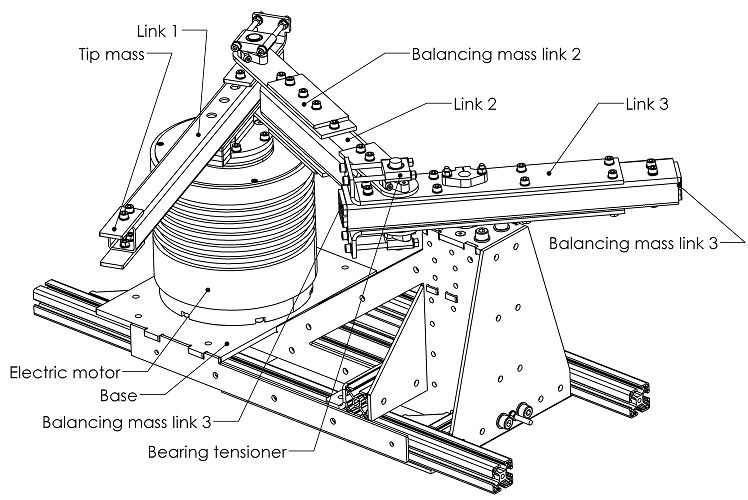
Experimental setup to measure and show the differences in base vibrations between the balanced and unbalanced motions.
Prototype of a dynamically balanced planar robotic manipulator arm designed for high-speed pick & place tasks. The design is based on the inverted four-bar linkage and fully inherently balanced for shaking forces and shaking moments such that it does not generate vibrations in its base. It was also designed for high stiffness and high eigenfrequencies, important for precise high-speed control. The video shows the unbalanced motion first and subsequently the balanced motions for 5G (49 m/s^2) and 21G (206 m/s^2) accelerations.
Publicaties:
|
|