"Since 2000 I have been working on the development of sculptures with expressive motion as a starting point."
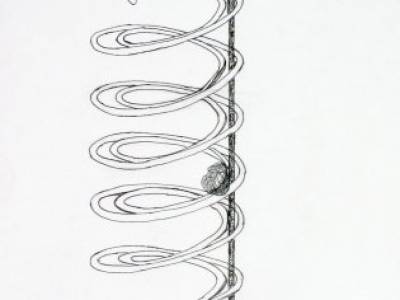
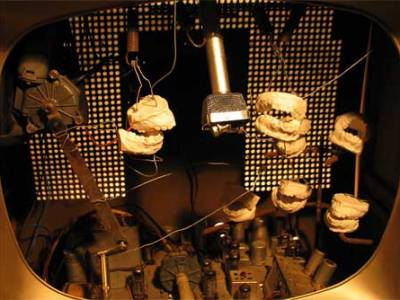
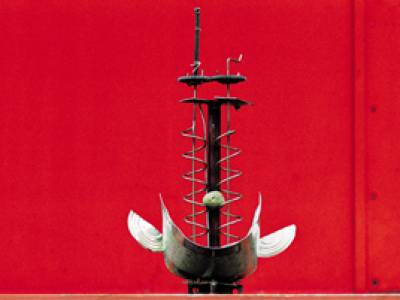
Since 2000 I have been working on the development of sculptures with expressive motion as a starting point. Mechanism kinematics and dynamics, balance, and human interaction I use as the main elements for this. Below you find an overview of my sculptures.
Videos can be found in my YouTube channel.