
"Since 2000 I have been working on the development of sculptures with expressive motion as a starting point."
Robot for the automatic washing of large buildings - 2012
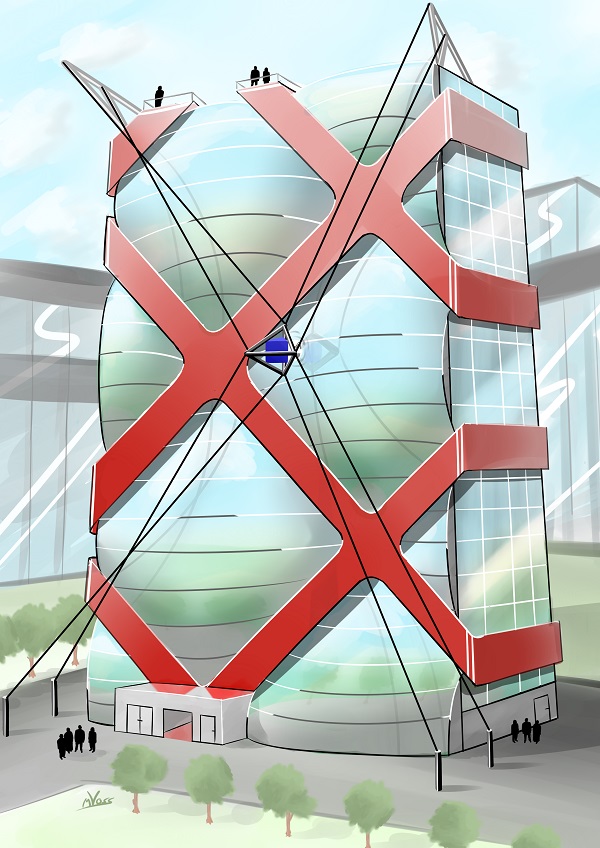
Conceptual design of a robotic device for the washing of large facades and roofs. Winches fixed in the corners of the building wind and unwind long cables with which a cleaning device is moved across the full facade.
In 2008 I was asked by a company in the Rotterdam area for a robotic solution for the washing of a glass roof. For a historical building there was the plan to cover its courtyard with a glass roof however there were troubles on how to do the cleaning. To make the roof accessible for persons to clean it by hand was difficult and expensive and also to develop a specific automatized cleaning system would be much more expensive than the construction of the roof itself. There was a need for an affortable robotic solution for washing.
In my scientific field at the time there was much activity on the design of cable-driven robots: a platform/end effector/robotic gasper moved and controlled by multiple cables that get shorter and longer by winding and unwinding them. They were considered as pick & place manipulators with a very large workspace. It was right away clear for me that this type of system had all the potential for the washing of buildings: a single system would be able to clean various architectural designs as the cables can be flexibly adapted and they could be very long to cover the full facade of a high building at once.
Since I had no time myself to directly investigate this, I looked for a master student to do it as a master graduation project. First at the Delft University of Technology where I found no student who was interested, but after I had moved to the University of Twente in 2010 I found an excellent student Kevin Voss who was very enthusiastic and made the project very successful (for his thesis he received the national Tata Steel Award) even leading to a patent. The research was focussed on the feasibility of the concept: how can the washing device reach all spots on a curved surface such as in blob-architecture and cross obstacles with the cables properly aligned and controllable. The outcomes were published in 2012 in two scientific papers.
At the same time of the graduation of Kevin there was another graduate student in our department, Stefan Spanjer, who had the wish to start a business after his graduation. He became very enthusiastic of the cable driven washing system concept and started a spin-off company in 2014 to further develop the concept and to bring it to the market with the support of the University of Twente. His company KITE Robotics is going well and the developed systems now clean various buildings such as the roof of the Utrecht Central train station.
Although I have no longer been involved since the start of KITE Robotics, I enjoy seeing my initiative and research results develop step by step into the future standard of building cleaning.
Publications:
|
|
Patent:
|